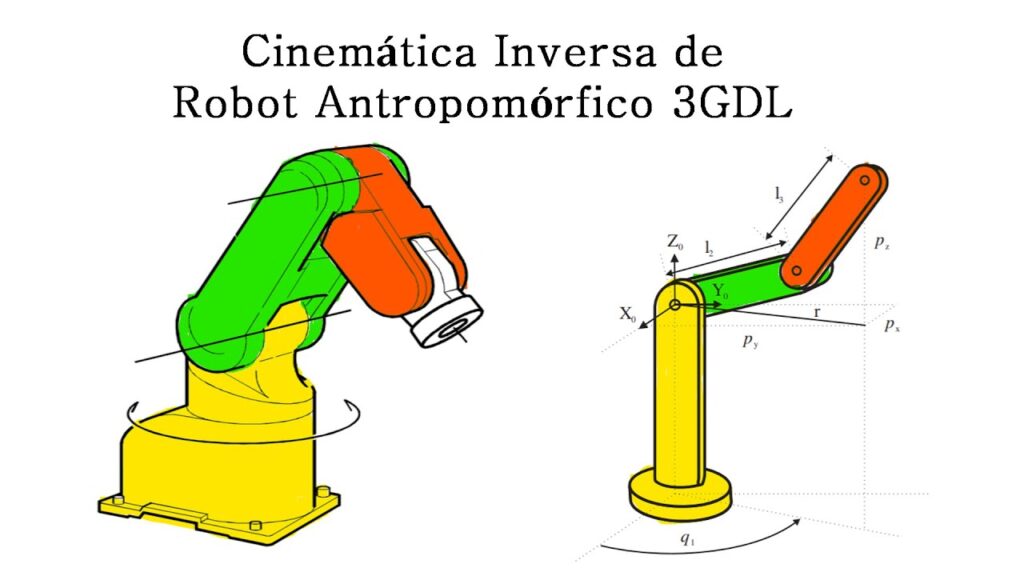
Cinematica Inversa De Un Robot De 3 Grados De Libertad
¡Hola! Alguna vez te has preguntado cómo un brazo robótico sabe exactamente cómo moverse para agarrar un objeto? La respuesta está en un concepto llamado Cinemática Inversa.
Vamos a explorarlo, específicamente para un robot con 3 grados de libertad. ¡No te preocupes si suena complicado! Lo vamos a simplificar paso a paso.
¿Qué es un Grado de Libertad (GDL)?
Primero, entendamos qué significa "grados de libertad". Imagina tu brazo humano. Puedes mover tu hombro hacia adelante y hacia atrás, arriba y abajo. También puedes rotar tu antebrazo. Cada uno de estos movimientos independientes es un grado de libertad. Un robot con 3 GDL tiene tres articulaciones que le permiten moverse de tres maneras diferentes.
Must Read
Un ejemplo sencillo: un brazo robótico que solo puede moverse en un plano (como dibujar en una hoja de papel). Este brazo podría tener una articulación en la base (para rotar) y dos articulaciones más para extender o doblar el brazo.
¿Qué es Cinemática?
La cinemática es el estudio del movimiento, sin preocuparse por las fuerzas que lo causan. Nos enfocamos en la posición, velocidad y aceleración. En el contexto de los robots, la cinemática directa nos dice dónde está el extremo del robot (su "mano") si conocemos los ángulos de cada articulación.

Piensa en un GPS. Introduces coordenadas y te da una ruta (ángulos de las articulaciones). La cinemática directa es como tener la ruta (ángulos) y saber dónde terminarás (posición del extremo del robot).
¿Qué es Cinemática Inversa?
Aquí es donde las cosas se ponen interesantes. La cinemática inversa es el proceso de encontrar los ángulos de las articulaciones necesarios para que el extremo del robot alcance una posición y orientación deseadas. Es lo opuesto a la cinemática directa.

Volviendo al ejemplo del GPS: Introduces las coordenadas de destino. La cinemática inversa es como darle al robot la ubicación del objeto que debe agarrar y que el robot calcule cómo debe doblar y rotar sus articulaciones para llegar allí.
El Desafío de la Cinemática Inversa
Resolver la cinemática inversa puede ser complicado porque, a diferencia de la cinemática directa, no siempre hay una solución única. A veces, hay múltiples combinaciones de ángulos que pueden llevar al extremo del robot al mismo punto.
Imagina estirar tu brazo para tocar un punto en la pared. Puedes hacerlo con el codo más alto o más bajo. Ambos movimientos logran el mismo resultado, pero con diferentes ángulos en tus articulaciones. Esto significa que puede haber múltiples soluciones. También, podría no haber ninguna solución si el punto está fuera del alcance del brazo.

Ejemplo Simplificado: Robot de 2 GDL
Para simplificar, pensemos en un robot de 2 GDL. Imagina un brazo con dos segmentos conectados por dos articulaciones rotatorias. La cinemática inversa buscaría los ángulos de estas dos articulaciones para que el extremo del brazo llegue a una posición específica (x, y).
Matemáticamente, esto implica resolver un sistema de ecuaciones trigonométricas. La complejidad aumenta rápidamente con más grados de libertad. Para un robot de 3 GDL, las ecuaciones son aún más complejas.

Aplicaciones de la Cinemática Inversa
La cinemática inversa es crucial en muchas aplicaciones robóticas. Se utiliza en robots industriales para ensamblar productos, soldar, pintar y recoger objetos. También se usa en robots quirúrgicos, robots exploradores y videojuegos para controlar el movimiento de personajes.
Piensa en un brazo robótico que suelda piezas de un coche. La cinemática inversa es lo que le permite al brazo seguir una trayectoria precisa para realizar la soldadura correctamente.
Espero que esto te haya dado una buena introducción a la cinemática inversa. Aunque puede parecer complicado, la idea básica es bastante simple: calcular los movimientos que un robot necesita hacer para alcanzar un objetivo específico. ¡Sigue explorando y aprendiendo!