Differential Geometry Of Curves And Surfaces Tapp

Vamos a explorar la Geometría Diferencial de Curvas y Superficies, inspirándonos en el libro de Tapp. Desglosaremos los conceptos clave paso a paso. Usaremos un lenguaje sencillo y ejemplos para facilitar la comprensión.
Curvas Parametrizadas
Consideremos una curva en el espacio. Podemos describirla usando una función vectorial. Esta función depende de un parámetro, usualmente llamado t. Por ejemplo, γ(t) = (t, t2, t3) representa una curva en R3. A medida que t varía, el punto γ(t) traza la curva.
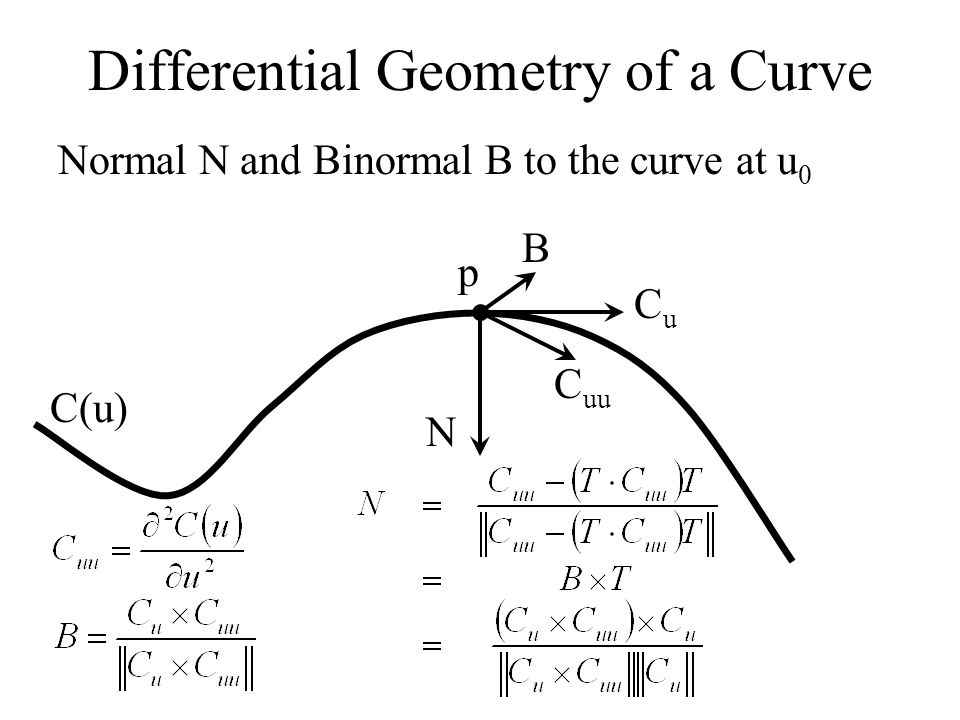
La derivada de γ(t), denotada por γ'(t), nos da el vector tangente a la curva en el punto γ(t). Este vector apunta en la dirección en la que la curva se está moviendo. Su magnitud, ||γ'(t)||, representa la rapidez con la que se está recorriendo la curva.
Must Read
Si ||γ'(t)|| = 1 para todo t, decimos que la curva está parametrizada por longitud de arco. Esto significa que la distancia recorrida a lo largo de la curva es igual al cambio en el parámetro t. La parametrización por longitud de arco simplifica muchos cálculos.
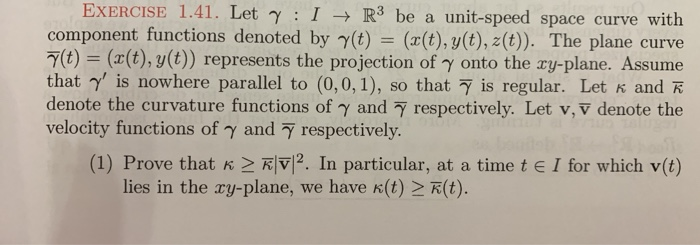
Curvatura
La curvatura mide qué tan rápido cambia la dirección del vector tangente. Se define como κ(t) = ||T'(t)||, donde T(t) = γ'(t) / ||γ'(t)|| es el vector tangente unitario. Una curvatura grande significa que la curva se está doblando bruscamente. Una curvatura de cero significa que la curva es una línea recta.
Para calcular la curvatura, primero encontramos el vector tangente unitario T(t). Luego, derivamos T(t) con respecto a t. Finalmente, calculamos la magnitud de T'(t). Este valor es la curvatura.
Por ejemplo, consideremos un círculo de radio r parametrizado por γ(t) = (r cos(t), r sin(t)). Su curvatura es constante e igual a 1/r. Cuanto más pequeño es el radio, mayor es la curvatura.
Superficies Parametrizadas
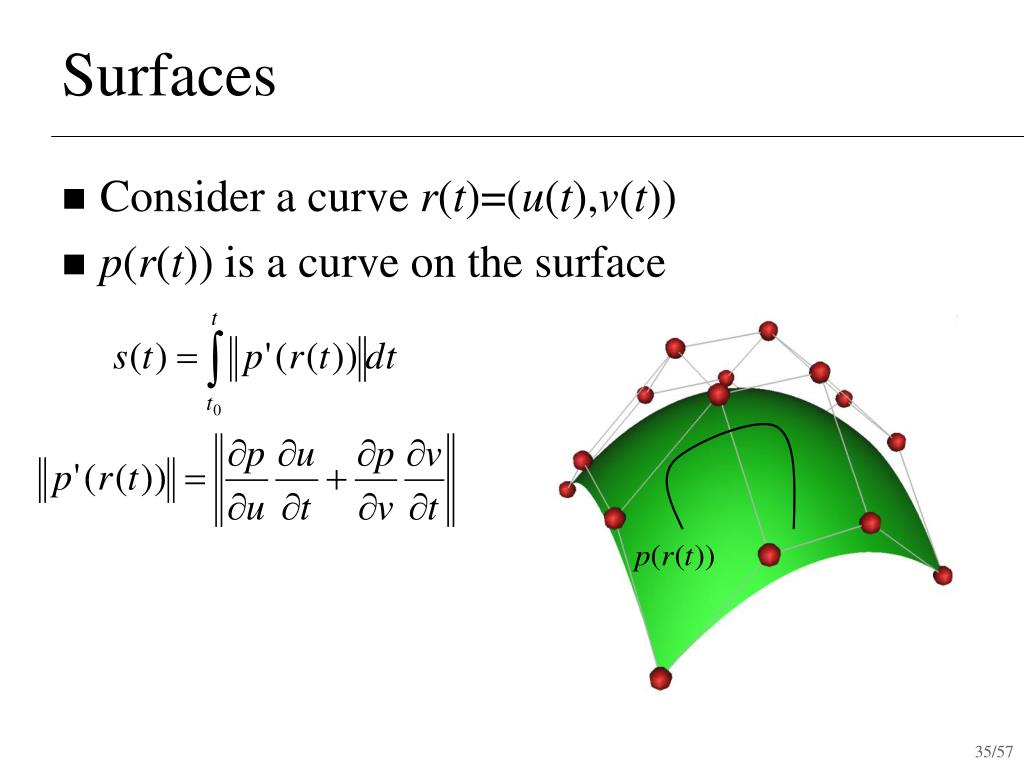
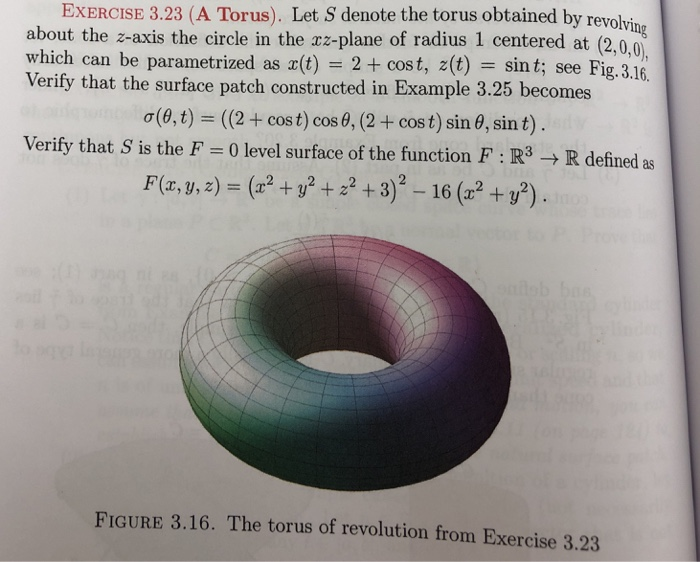
Una superficie en R3 se puede describir mediante una función vectorial de dos parámetros, digamos u y v. Por ejemplo, σ(u, v) = (u, v, u2 + v2) representa una superficie parabólica. Para cada par de valores (u, v), σ(u, v) es un punto en la superficie.

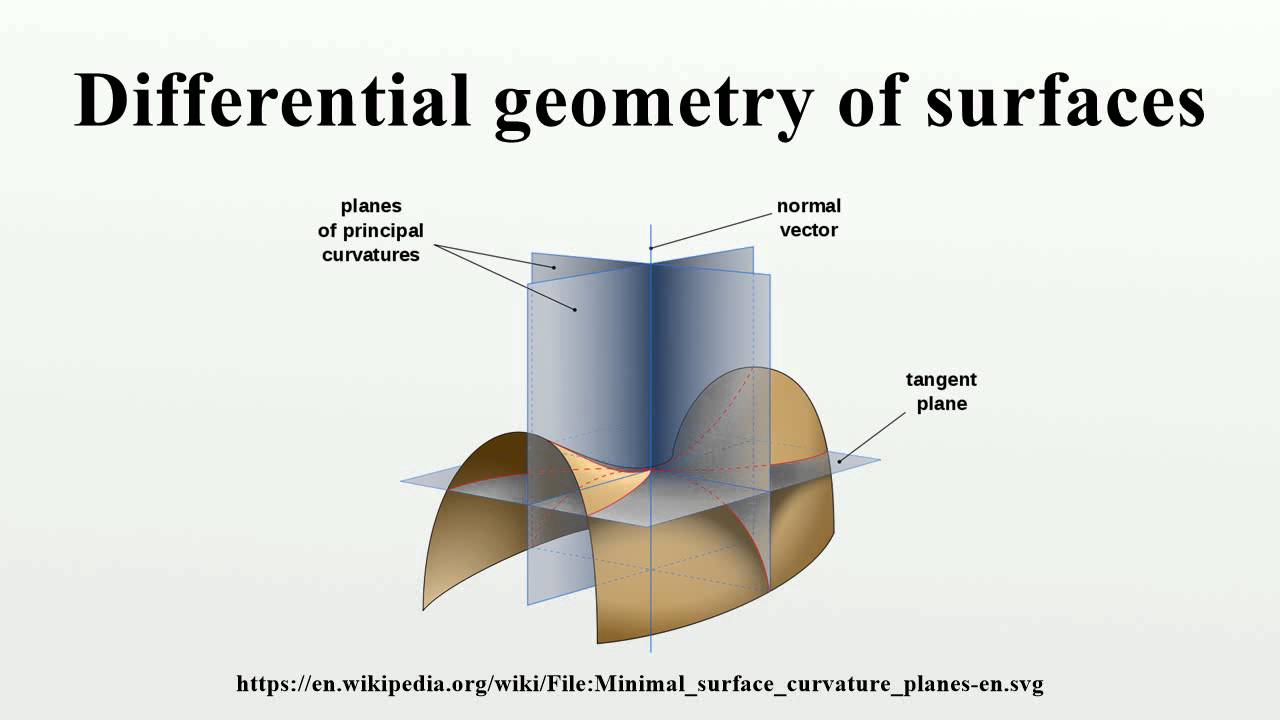
Las derivadas parciales de σ(u, v) con respecto a u y v, denotadas por σu y σv, son vectores tangentes a la superficie. Estos vectores forman una base para el espacio tangente a la superficie en el punto σ(u, v).
El vector normal unitario a la superficie es dado por N = (σu × σv) / ||σu × σv||. Este vector es perpendicular a ambos σu y σv, y por lo tanto, es perpendicular al plano tangente.

Primera y Segunda Forma Fundamental
La primera forma fundamental, denotada por I, mide distancias y ángulos en la superficie. Se define como I(v, w) = v ⋅ w, donde v y w son vectores tangentes. En términos de los coeficientes E = σu ⋅ σu, F = σu ⋅ σv, y G = σv ⋅ σv, tenemos I = E du2 + 2F du dv + G dv2.
La segunda forma fundamental, denotada por II, mide la curvatura de la superficie. Se define como II(v, w) = -dN(v) ⋅ w, donde dN es el diferencial del mapa de Gauss. En términos de los coeficientes L = σuu ⋅ N, M = σuv ⋅ N, y N = σvv ⋅ N, tenemos II = L du2 + 2M du dv + N dv2.
Las formas fundamentales son herramientas esenciales para estudiar la geometría intrínseca y extrínseca de las superficies. Nos permiten calcular cantidades importantes como la curvatura gaussiana y la curvatura media.

Curvatura Gaussiana y Media
La curvatura gaussiana, denotada por K, es el producto de las curvaturas principales. Se puede calcular como K = (LN - M2) / (EG - F2). La curvatura gaussiana es una propiedad intrínseca de la superficie, lo que significa que no depende de cómo la superficie está inmersa en el espacio.
La curvatura media, denotada por H, es el promedio de las curvaturas principales. Se puede calcular como H = (EN - 2FM + GL) / (2(EG - F2)). La curvatura media es una propiedad extrínseca de la superficie.
La curvatura gaussiana y media dan información importante sobre la forma de la superficie. Por ejemplo, una superficie con curvatura gaussiana positiva en un punto es localmente convexa en ese punto. Una superficie con curvatura gaussiana negativa en un punto es localmente una silla de montar en ese punto.