Control Pid Para Motor Dc Con Pic

¿Quieres controlar un motor DC de forma precisa usando un PIC? Necesitas el control PID. Aquí te explicamos cómo funciona de forma sencilla.
¿Qué es el Control PID?
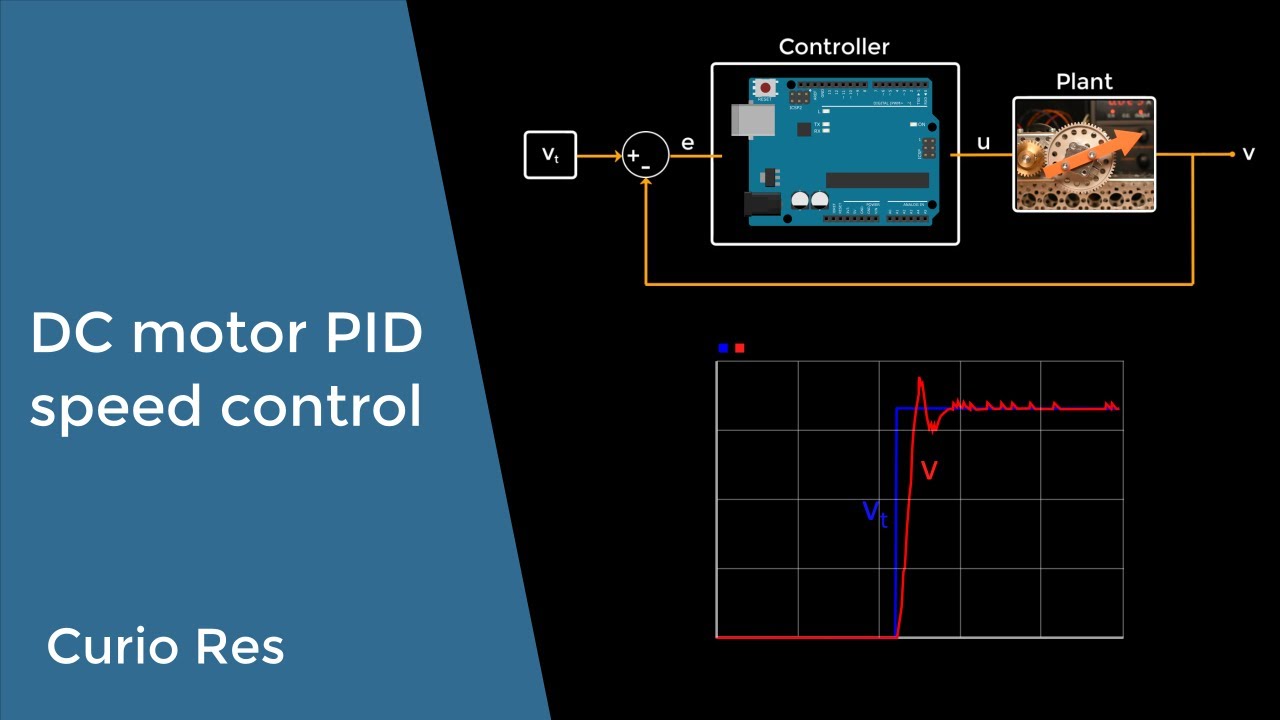
PID significa Proporcional-Integral-Derivativo. Es un algoritmo que calcula un "error" (la diferencia entre lo que quieres y lo que tienes) y usa ese error para ajustar la salida. Imagina que quieres que un motor gire a 100 RPM (Revoluciones Por Minuto). Si el motor está girando a 50 RPM, el error es 50 RPM. El PID ajustará la potencia del motor para reducir este error.
¿Por qué usar PID con un PIC para un motor DC?
Sin control, el motor podría sobrepasar la velocidad deseada (sobreoscilación) o tardar mucho en alcanzarla. El PID en un PIC permite:
Must Read
- Precisión: Alcanzar y mantener la velocidad deseada.
- Estabilidad: Evitar oscilaciones y movimientos bruscos.
- Respuesta rápida: Alcanzar la velocidad deseada rápidamente.
Componentes del Control PID
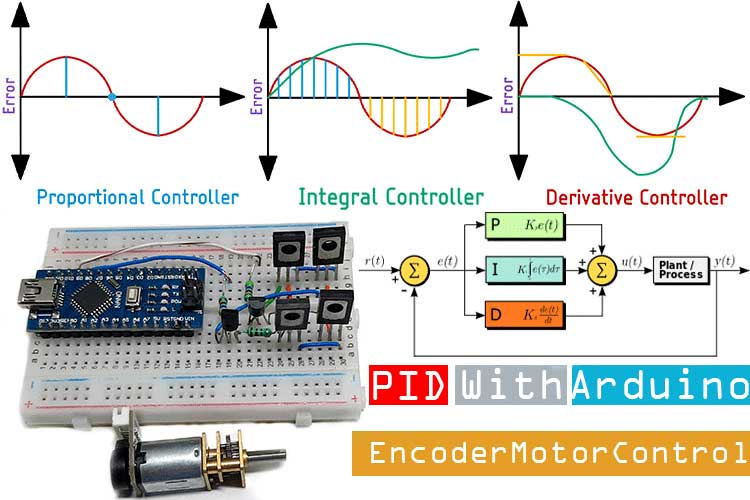
El PID tiene tres componentes principales, cada uno con su función:

- Proporcional (P): Ajusta la salida en proporción al error actual. Un error grande genera una corrección grande. Ejemplo: Si el error es grande, el motor recibe mucha potencia.
- Integral (I): Acumula errores pasados para eliminar el error en estado estacionario (el error que queda después de un tiempo). Ejemplo: Si el motor siempre gira un poco más lento de lo deseado, el componente integral aumenta la potencia poco a poco para compensar.
- Derivativo (D): Predice el error futuro basándose en la tasa de cambio del error actual. Ayuda a amortiguar las oscilaciones. Ejemplo: Si el motor está acelerando muy rápido, el componente derivativo reduce la potencia para evitar que sobrepase la velocidad deseada.
Implementación paso a paso con un PIC
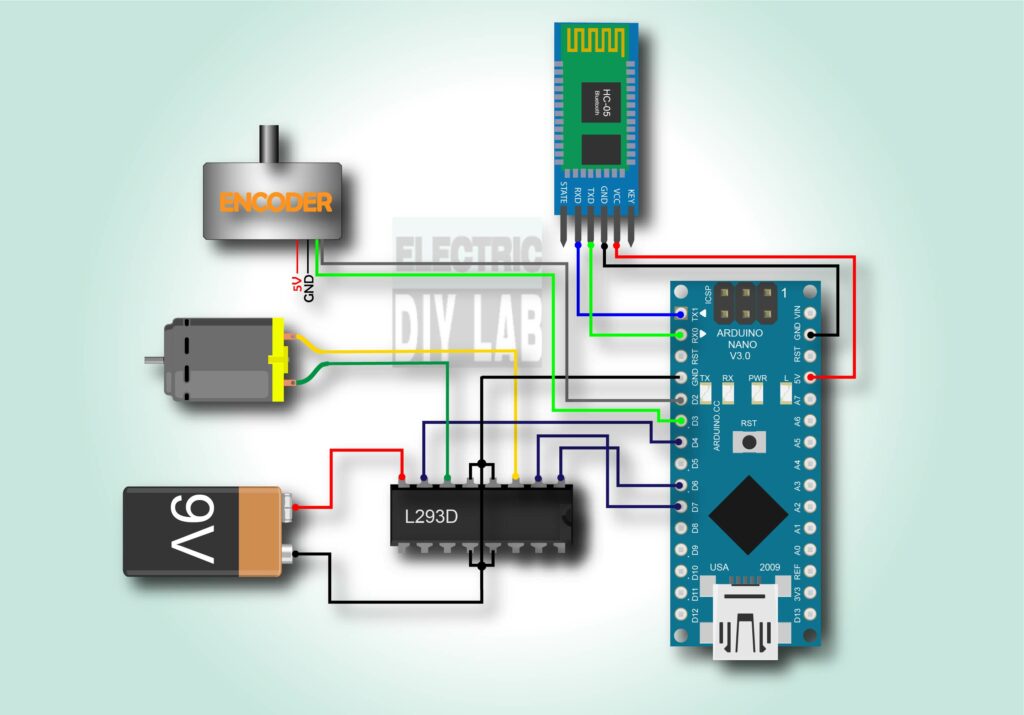
- Medición: Usar un sensor (ej. encoder) para medir la velocidad actual del motor.
- Cálculo del Error: Restar la velocidad actual de la velocidad deseada. Error = Velocidad Deseada - Velocidad Actual
- Cálculo del PID: Aplicar las fórmulas del PID para obtener la salida. Esto implica multiplicar el error por las constantes Kp (Proporcional), Ki (Integral) y Kd (Derivativo).
- Salida = Kp * Error + Ki * Suma de Errores + Kd * (Error Actual - Error Anterior)
- Ajuste de la Potencia del Motor: Usar la salida del PID para controlar la potencia del motor, generalmente a través de un PWM (Pulse Width Modulation).
- Repetición: Repetir los pasos anteriores continuamente para mantener el control.
Ajuste de las Constantes PID (Kp, Ki, Kd)
Ajustar las constantes Kp, Ki y Kd es crucial. No hay una fórmula mágica, pero existen métodos (ej. Ziegler-Nichols) y la experimentación. Empieza con Kp, luego Ki, y finalmente Kd. Observa el comportamiento del motor después de cada ajuste.
Ejemplo Simplificado en C para PIC (Pseudo-código)
Este es un ejemplo muy simplificado para ilustrar la idea:

float velocidad_deseada = 100; // RPM
float velocidad_actual = leer_velocidad(); // Función para leer el sensor
float error = velocidad_deseada - velocidad_actual;
float kp = 0.5; // Constante Proporcional
float salida = kp * error;
ajustar_pwm(salida); // Función para ajustar el PWM del motor
Este es solo un ejemplo. Un control PID completo requiere implementar los componentes Integral y Derivativo, y ajustar las constantes correctamente.
¡Con práctica y paciencia, dominarás el control PID para motores DC con PIC!