Describir Las Propiedades Del Control P Pi Pd Y Pid

En el mundo del control automático, los controladores P, PI, PD y PID son bloques fundamentales. Estos controladores ajustan automáticamente una variable para mantenerla en un valor deseado, conocido como el punto de ajuste (setpoint). Entender sus propiedades es crucial para diseñar sistemas de control eficientes y precisos.
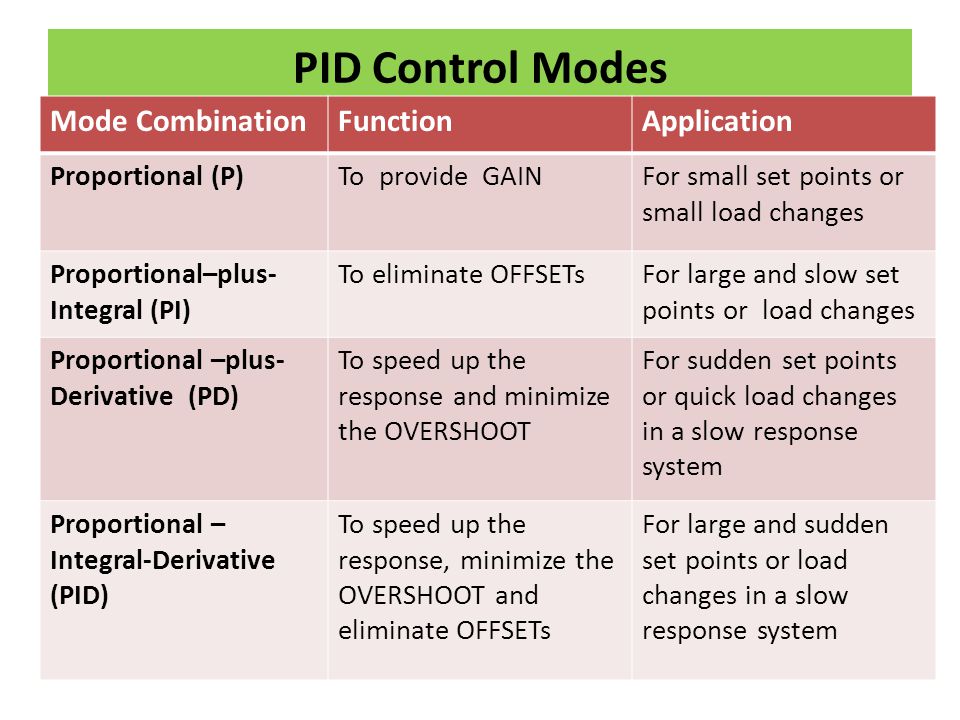
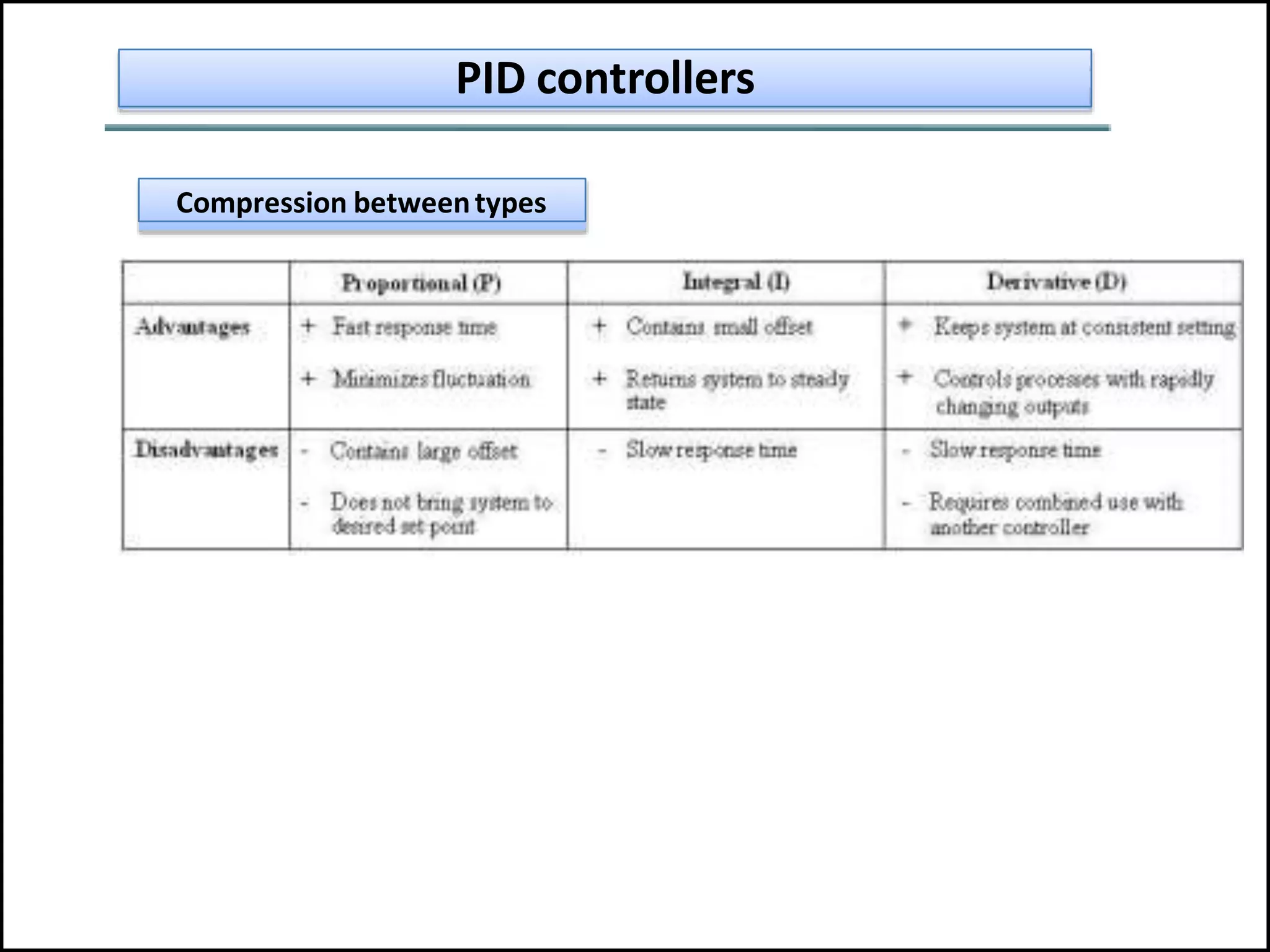
Control Proporcional (P)
El control P es el más simple de los cuatro. Su salida es directamente proporcional al error, que es la diferencia entre el punto de ajuste y el valor real de la variable. Matemáticamente, la salida del controlador (u) es: u = Kp * error, donde Kp es la ganancia proporcional.
Una Kp alta significa que una pequeña diferencia en el error resulta en un cambio grande en la salida del controlador. Esto puede hacer que el sistema responda rápidamente, pero también puede llevar a oscilaciones. Una Kp baja resulta en una respuesta lenta, pero más estable.
Must Read
Por ejemplo, imagina controlar la temperatura de un horno. Si la temperatura es inferior al punto de ajuste, el controlador P aumentará la potencia de la resistencia. Cuanto mayor sea la diferencia de temperatura, mayor será el aumento de potencia. Sin embargo, el control P solo rara vez alcanza el punto de ajuste exacto. Casi siempre existirá un error en estado estacionario (offset).
Control Integral (I)
El control I aborda el problema del error en estado estacionario. Su salida es proporcional a la integral del error a lo largo del tiempo. Esto significa que incluso un pequeño error persistente eventualmente conducirá a un cambio significativo en la salida del controlador. La fórmula es: u = Ki * ∫error dt, donde Ki es la ganancia integral.

El control I acumula el error con el tiempo. Si el error persiste, la salida del controlador continúa aumentando hasta que el error se elimina. Esto elimina el offset presente en el control P.
Volviendo al ejemplo del horno, si el control P deja la temperatura ligeramente por debajo del punto de ajuste, el control I comenzará a aumentar gradualmente la potencia hasta que la temperatura alcance el valor deseado. Un problema del control I es que puede causar sobreimpulso y oscilaciones, especialmente si la ganancia Ki es demasiado alta.
Control Derivativo (D)
El control D se enfoca en la tasa de cambio del error. Su salida es proporcional a la derivada del error con respecto al tiempo. u = Kd * d(error)/dt, donde Kd es la ganancia derivativa. El control D anticipa el comportamiento futuro del error y reacciona en consecuencia.
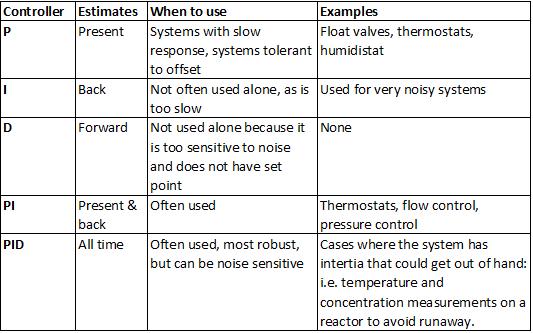
Si el error está cambiando rápidamente, el control D proporcionará una gran corrección. Si el error es constante, el control D no hará nada. El control D ayuda a amortiguar las oscilaciones y a mejorar la estabilidad del sistema.
En el ejemplo del horno, si la temperatura se está acercando rápidamente al punto de ajuste, el control D disminuirá la potencia de la resistencia para evitar que la temperatura sobrepase el valor deseado. El control D es sensible al ruido y puede amplificarlo, lo que puede generar comportamientos no deseados.

Control PID
El control PID combina las ventajas de los tres controles: P, I y D. La salida del controlador PID es la suma de las salidas de cada componente. u = Kp * error + Ki * ∫error dt + Kd * d(error)/dt. Ajustando las ganancias Kp, Ki, y Kd, se puede optimizar el rendimiento del sistema.
El control P proporciona una respuesta rápida al error. El control I elimina el error en estado estacionario. El control D mejora la estabilidad y amortigua las oscilaciones.
El ajuste de un controlador PID puede ser un proceso iterativo. Existen varios métodos de sintonización, como el método de Ziegler-Nichols, que ayudan a encontrar los valores óptimos para las ganancias Kp, Ki y Kd. Los controladores PID son ampliamente utilizados en una variedad de aplicaciones, desde el control de temperatura y flujo hasta el control de movimiento en robots y vehículos autónomos. La correcta comprensión de sus propiedades es esencial para el diseño de sistemas de control efectivos.